18 Nov 2019
You’ve been there - after putting your backpack in a frigid car, walking against the Wisconsin wind, or biking across the frozen lake, you arrive at work. You rest your palms on the keyboard to begin typing your password, and recoil in pain from the sudden cold of the metal sucking the heat from your skin.
How do you quickly warm up a laptop? Make it do a lot of work.
Here’s a one-line, built-in command that will peg your CPU to 100%:
Run that from a Terminal, and don’t forget about it heh. What the command does is repeatedly send the word yes over and over to the null device, using 100% CPU.
If you want to stress your Mac more quickly and get your CPU hotter, try the stress utility:
brew install stress
stress -c 6 -m 2 -t 300
This will start 6 threads that each peg your CPU to 100% and 2 thread that do memory malloc/free. It has a 300-second timeout (5 mins) in case you walk away from your computer so it doesn’t overheat.
Bonus points, you can add an alias to your ~/.bash-profile to automate these options:
alias warm='stress -c 6 -m 2 -t 300'
fred: bash$ warm
stress: info: [65121] dispatching hogs: 6 cpu, 0 io, 2 vm, 0 hdd
Happy winter!
25 Oct 2019
These are the slides from a talk I’m giving at Chippewa Valley Code Conference this weekend.
Here’s the talk abstract:
Brilliant developers, project managers, and IT professionals build tools perfectly suited to their users. So why don’t those users use them? In this talk, you’ll learn new ways to frame your discussion of your technology to make your users excited about the tool you’ve built to help them.
It’s frustrating when you’ve poured your creative energy into a tool that solves a problem for your users, but they don’t buy in . You know your users - they turn to you for help with their information problems, and you have the analytical skill to find solutions for them. So why is it so hard to get them on board with a new piece of software or hardware? As a developer, I found that subtly changing the way I talked about the exact same software led to way more progress with my users. Learn ways to get stakeholder buy-in using lessons in persuasion from entrepreneurship.
22 Mar 2019
When I started my new job, I was provided a new MacBook Pro to use as my work computer. I wanted to fit my new MacBook into my existing 27” Apple Cinema Display from 2010, which I’ve been using with my personal 2013 MacBook Air for 5 years. Should be easy, right? They’re both Apple products?
Wrong.
It turns out that Apple doesn’t even offer a first-party solution to connect the new Thunderbolt 3 (USB-C shaped port) MacBook Pro to the Cinema Display.
I went through 4 different orders on Amazon before I found a third-party combination that works, but now it’s working great.

The requirements
The Apple Cinema Display provides 3 ports in its cable - MagSafe power delivery; USB-A for the included USB hub, webcam, and speakers; and Mini DisplayPort for video.
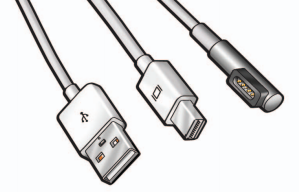
To get all three functions on my MacBook Pro, I needed:
- A MagSafe to USB-C adapter for power delivery
- A Thunderbolt 3 to Mini DisplayPort for video
- A USB-C to USB-A adapter for everything else.
Unfortunately the 13” MacBook Pro only has 2 Thunderbolt 3 ports, so I also needed some way to daisy chain or collapse two of these functions into one port.
The solution
I eventually found the right combination of adapters:
This has the important feature of the extra pass-through power port.
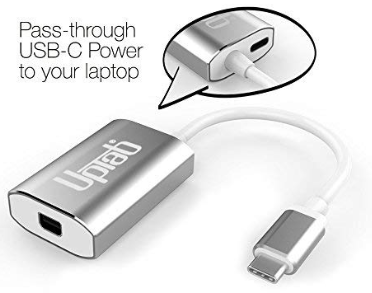
A slim profile to adapt USB-C to USB-A.

My only complaint about this adapter is that it gets very hot.

In the process I learned a lot about the difference between Thunderbolt 3 & USB-C, which use the same connector but don’t provide the same functionality.
In the end, I figured it out - hopefully this will help you. A not-terribly-messy-looking, serviceable way to connect at 2010 27” Apple Cinema Display to a modern MacBook Pro with Thunderbolt 3.
09 Mar 2019
We are in the middle of a “stuff” revolution.
The success of Mario Kondo’s book The Life-Changing Magic of Tidying Up and its Netflix successor Tidying Up speaks to what earlier books like Stuffocation have realized about our era: most of us have too much crap.
I fit neatly into the generational shift towards preferring experiences over things, but I’m also a hobbyist with a short attention span. Any time I take on a new hobby, I accumulate the associated stuff. And very occasionally, that stuff doesn’t make me feel “stuffocated” - it sparks joy, if you will.
These are a few of the things that “spark joy” for me. Hopefully they’ll bring you joy too.
Flex-Core Stainless Steel Removable Head, Dishwasher Safe

I find it easiest to explain why I love this spatula so much by considering the variety of tasks that we put a spatula through: it’s a tool that needs to be flexible enough to conform to the edges of a container, but sturdy enough to scrape away stuck-on bits. It needs to be wide enough to flip an omelet but narrow enough to fit into a jam jar. It should never scratch the coating of a pan, but never get melted from the heat. It should be able to get tossed in the dishwasher but not leave food residue trapped inside it.
This spatula nails all of these, which alone make it the best spatula I’ve ever owned, but that’s not what sparks joy about it.
It’s the heavy stainless-steel handle.
Like a good knife that is balanced to require only the tiniest effort from a cook, this spatula considers the ergonomic of its use. The heft of the handle helps press the spatula into the bowl so you don’t have to use a ton of force to scrape the sides. It can rest on the edge of a cutting board without tipping over the edge of the counter. And it’s removable, so you can thoroughly wash the joint between the head and the handle.
You can get one here, and help a charity through Amazon Smile:
https://smile.amazon.com/gp/product/B01EBZ0IFQ

I never had Indian food until I was in college. I loved the richness and flavor-forwardness of the food in Indian restaurants in the U.S., and as I sought out more I learned there’s a whole world beyond what you get in those restaurants. Indian food has featured heavily in my Vegan January cooking explorations, and is an extremely versatile cuisine for the Instant Pot that I was recently gifted (for excellent Instant Pot Indian recipes, check out My Heart Beets). Buttermilk brings those real flavors of Indian kitchens, not just what’s found in restaurants, right to your freezer. The food is packaged fresh but freezes well, is all vegan, and takes around 5 minutes to heat up in a microwave. Their upma has become my weekday breakfast staple.
Get some Buttermilk and help me get some more too at http://buttermilk.refr.cc/frederict

For years, I have used the surface of a desk or the bottom-tier mousepads freely distributed at my office. Spending $7 on a large mouse pat with a proper grip has improved my computer experience more than I ever expected. My mouse glides over the surface, it feels like an air-hockey table. This keeps up with the spatula’s theme of a tool helping me expend as little effort as necessary to use it well. It’s pretty new to me, so we’ll see how well it holds up, but I expect the stitched edges to go a very long way in preventing fraying. Get one at https://smile.amazon.com/gp/product/B07D99QJRS.

I bought these Merino wool boxer briefs while traveling in New Zealand, and they’re still my favorite pair after a year of wear. Merino is naturally anti-odor and moisture-wicking. These don’t ride up, the elastic in the waist hasn’t stretched out, and I can wear them for multiple days of a backpacking trip (ew) and they’re still comfortable and far less ripe than a dri-fit T-shirt worn at the same time (I know from experience). You can’t get them shipped to the U.S., but maybe ask a friend down under to mule them home for you? (Looking at you, Zac).

These towels are outrageously expensive but totally worth it. They are woven with these little waffle pockets that soak up water but are very breathable, so the towel always feels cool and light and always has capacity to dry more. https://onsentowel.com/products/the-onsen-bath-sheet?variant=50915279755
Is there something you love that I should know about? Drop me a line @z3ugma.
24 Nov 2018
I originally wrote this for a tutorial on learnxinyminutes.com, which attempts to teach you the basics of a new programming language. I use M daily at work, and it gets a lot of unfair criticism in tech journalism for its age and its terseness. I liken M to Python in its usefulness for procedural scripting. It’s also got a very nice debugging tool that lets you pause code mid-execution and inspect the variables as you’re running it. Finally, the database is built right into the language. While I think that setting up a new M environment can be tedious and require a lot of Unix knowledge compared to other programming environments, database replication is very simple compared to some other databases.
Without further ado, here’s an introduction to M:
M, or MUMPS (Massachusetts General Hospital Utility Multi-Programming System) is
a procedural language with a built-in NoSQL database. Or, it’s a database with
an integrated language optimized for accessing and manipulating that database.
A key feature of M is that accessing local variables in memory and persistent
storage use the same basic syntax, so there’s no separate query
language to remember. This makes it fast to program with, especially for
beginners. M’s syntax was designed to be concise in an era where
computer memory was expensive and limited. This concise style means that a lot
more fits on one screen without scrolling.
The M database is a hierarchical key-value store designed for high-throughput
transaction processing. The database is organized into tree structures called
“globals”, which are sparse data structures with parallels to modern formats
like JSON.
Originally designed in 1966 for the healthcare applications, M continues to be
used widely by healthcare systems and financial institutions for high-throughput
real-time applications.
Example
Here’s an example M program to calculate the Fibonacci series:
fib ; compute the first few Fibonacci terms
new i,a,b,sum
set (a,b)=1 ; Initial conditions
for i=1:1 do quit:sum>1000
. set sum=a+b
. write !,sum
. set a=b,b=sum
; Comments start with a semicolon (;)
Data Types
M has two data types:
; Numbers - no commas, leading and trailing 0 removed.
; Scientific notation with 'E'.
; Floats with IEEE 754 double-precision values (15 digits of precision)
; Examples: 20, 1e3 (stored as 1000), 0500.20 (stored as 500.2)
; Strings - Characters enclosed in double quotes.
; "" is the null string. Use "" within a string for "
; Examples: "hello", "Scrooge said, ""Bah, Humbug!"""
Commands
Commands are case insensitive, and have a shortened abbreviation, often the first letter. Commands have zero or more arguments,depending on the command. M is whitespace-aware. Spaces are treated as a delimiter between commands and arguments. Each command is separated from its arguments by 1 space. Commands with zero arguments are followed by 2 spaces.
W(rite)
Print data to the current device.
! is syntax for a new line. Multiple statements can be provided as additional arguments:
R(ead)
Retrieve input from the user
READ var
r !,"Wherefore art thou Romeo? ",why
Multiple arguments can be passed to a read command. Constants are outputted. Variables are retrieved from the user. The terminal waits for the user to enter the first variable before displaying the second prompt.
r !,"Better one, or two? ",lorem," Better two, or three? ",ipsum
S(et)
Assign a value to a variable
SET name="Benjamin Franklin"
s centi=0.01,micro=10E-6
w !,centi,!,micro
;.01
;.00001
K(ill)
Remove a variable from memory or remove a database entry from disk.
Globals and Arrays
In addition to local variables, M has persistent variables stored to disk called globals. Global names must start with a caret (^). Globals are the built-in database of M.
Any variable can be an array with the assignment of a subscript. Arrays are sparse and do not have a predefined size. Arrays should be visualized like trees, where subscripts are branches and assigned values are leaves. Not all nodes in an array need to have a value.
s ^cars=20
s ^cars("Tesla",1,"Name")="Model 3"
s ^cars("Tesla",2,"Name")="Model X"
s ^cars("Tesla",2,"Doors")=5
w !,^cars
; 20
w !,^cars("Tesla")
; null value - there's no value assigned to this node but it has children
w !,^cars("Tesla",1,"Name")
; Model X
Arrays are automatically sorted in order. Take advantage of the built-in sorting by setting your value of interest as the last child subscript of an array rather than its value.
; A log of temperatures by date and time
s ^TEMPS("11/12","0600",32)=""
s ^TEMPS("11/12","1030",48)=""
s ^TEMPS("11/12","1400",49)=""
s ^TEMPS("11/12","1700",43)=""
Operators
; Assignment: =
; Unary: + Convert a string value into a numeric value.
; Arthmetic:
; + addition
; - subtraction
; * multiplication
; / floating-point division
; \ integer division
; # modulo
; ** exponentiation
; Logical:
; & and
; ! or
; ' not
; Comparison:
; = equal
; '= not equal
; > greater than
; < less than
; '> not greater / less than or equal to
; '< not less / greater than or equal to
; String operators:
; _ concatenate
; [ contains a contains b
; ]] sorts after a comes after b
; '[ does not contain
; ']] does not sort after
Order of operations
Operations in M are strictly evaluated left to right. No operator has precedence over any other.
You should use parentheses to group expressions.
w 5+3*20
;160
;You probably wanted 65
w 5+(3*20)
Flow Control, Blocks, & Code Structure
A single M file is called a routine. Within a given routine, you can break your code up into smaller chunks with tags. The tag starts in column 1 and the commands pertaining to that tag are indented.
A tag can accept parameters and return a value, this is a function. A function is called with ‘$$’:
; Execute the 'tag' function, which has two parameters, and write the result.
w !,$$tag^routine(a,b)
M has an execution stack. When all levels of the stack have returned, the program ends. Levels are added to the stack with do commands and removed with quit commands.
D(o)
With an argument: execute a block of code & add a level to the stack.
d ^routine ;run a routine from the begining.
; ;routines are identified by a caret.
d tag ;run a tag in the current routine
d tag^routine ;run a tag in different routine
Argumentless do: used to create blocks of code. The block is indented with a period for each level of the block:
set a=1
if a=1 do
. write !,a
. read b
. if b > 10 d
. . w !, b
w "hello"
Q(uit)
Stop executing this block and return to the previous stack level.
Quit can return a value.
N(ew)
Clear a given variable’s value for just this stack level. Useful for preventing side effects.
Putting all this together, we can create a full example of an M routine:
; RECTANGLE - a routine to deal with rectangle math
q ; quit if a specific tag is not called
main
n length,width ; New length and width so any previous value doesn't persist
w !,"Welcome to RECTANGLE. Enter the dimensions of your rectangle."
r !,"Length? ",length,!,"Width? ",width
d area(length,width) ;Do a tag
s per=$$perimeter(length,width) ;Get the value of a function
w !,"Perimeter: ",per
q
area(length,width) ; This is a tag that accepts parameters.
; It's not a function since it quits with no value.
w !, "Area: ",length*width
q ; Quit: return to the previous level of the stack.
perimeter(length,width)
q 2*(length+width) ; Quits with a value; thus a function
Conditionals, Looping and $Order()
F(or) loops can follow a few different patterns:
;Finite loop with counter
;f var=start:increment:stop
f i=0:5:25 w i," " ;0 5 10 15 20 25
; Infinite loop with counter
; The counter will keep incrementing forever. Use a conditional with Quit to get out of the loop.
;f var=start:increment
f j=1:1 w j," " i j>1E3 q ; Print 1-1000 separated by a space
;Argumentless for - infinite loop. Use a conditional with Quit.
; Also read as "forever" - f or for followed by two spaces.
s var=""
f s var=var_"%" w !,var i var="%%%%%%%%%%" q
; %
; %%
; %%%
; %%%%
; %%%%%
; %%%%%%
; %%%%%%%
; %%%%%%%%
; %%%%%%%%%
; %%%%%%%%%%
I(f), E(lse), Postconditionals
M has an if/else construct for conditional evaluation, but any command can be conditionally executed without an extra if statement using a postconditional. This is a condition that occurs immediately after the command, separated with a colon (:).
; Conditional using traditional if/else
r "Enter a number: ",num
i num>100 w !,"huge"
e i num>10 w !,"big"
e w !,"small"
; Postconditionals are especially useful in a for loop.
; This is the dominant for loop construct:
; a 'for' statement
; that tests for a 'quit' condition with a postconditional
; then 'do'es an indented block for each iteration
s var=""
f s var=var_"%" q:var="%%%%%%%%%%" d ;Read as "Quit if var equals "%%%%%%%%%%"
. w !,var
;Bonus points - the $L(ength) built-in function makes this even terser
s var=""
f s var=var_"%" q:$L(var)>10 d ;
. w !,var
Array Looping - $Order
As we saw in the previous example, M has built-in functions called with a single $, compared to user-defined functions called with $$. These functions have shortened abbreviations, like commands.
One of the most useful is $Order() / $O(). When given an array subscript, $O returns the next subscript in that array. When it reaches the last subscript, it returns “”.
;Let's call back to our ^TEMPS global from earlier:
; A log of temperatures by date and time
s ^TEMPS("11/12","0600",32)=""
s ^TEMPS("11/12","0600",48)=""
s ^TEMPS("11/12","1400",49)=""
s ^TEMPS("11/12","1700",43)=""
; Some more
s ^TEMPS("11/16","0300",27)=""
s ^TEMPS("11/16","1130",32)=""
s ^TEMPS("11/16","1300",47)=""
;Here's a loop to print out all the dates we have temperatures for:
n date,time ; Initialize these variables with ""
; This line reads: forever; set date as the next date in ^TEMPS.
; If date was set to "", it means we're at the end, so quit.
; Do the block below
f s date=$ORDER(^TEMPS(date)) q:date="" d
. w !,date
; Add in times too:
f s date=$ORDER(^TEMPS(date)) q:date="" d
. w !,"Date: ",date
. f s time=$O(^TEMPS(date,time)) q:time="" d
. . w !,"Time: ",time
; Build an index that sorts first by temperature -
; what dates and times had a given temperature?
n date,time,temp
f s date=$ORDER(^TEMPS(date)) q:date="" d
. f s time=$O(^TEMPS(date,time)) q:time="" d
. . f s temp=$O(^TEMPS(date,time,temp)) q:temp="" d
. . . s ^TEMPINDEX(temp,date,time)=""
;This will produce a global like
^TEMPINDEX(27,"11/16","0300")
^TEMPINDEX(32,"11/12","0600")
^TEMPINDEX(32,"11/16","1130")
Further Reading
There’s lots more to learn about M. A great short tutorial comes from the University of Northern Iowa and Professor Kevin O’Kane’s Introduction to the MUMPS Language presentation.
To install an M interpreter / database on your computer, try a YottaDB Docker image.
YottaDB and its precursor, GT.M, have thorough documentation on all the language features including database transactions, locking, and replication:
